FOC(磁场定向控制)作为现代高性能电机控制的核心算法,其实时性直接决定了整个驱动系统的动态响应能力和控制精度。
传统基于 MCU 的软件实现方案受限于指令执行延迟和任务调度不确定性,已难以满足新一代 SiC/GaN 功率器件和超高速电机的苛刻要求。
本文深入分析 DSA(领域专用架构)eFPGA 在 FOC 控制环路中的独特价值,阐述其如何通过"领域专 用 Hard IP + 可编程逻辑"的创新架构,将控制环路响应从微秒级提升至纳秒级确定性,并在成本、开发效率等维度实现全面优化。
FOC 控制环路完整架构与关键时序节点
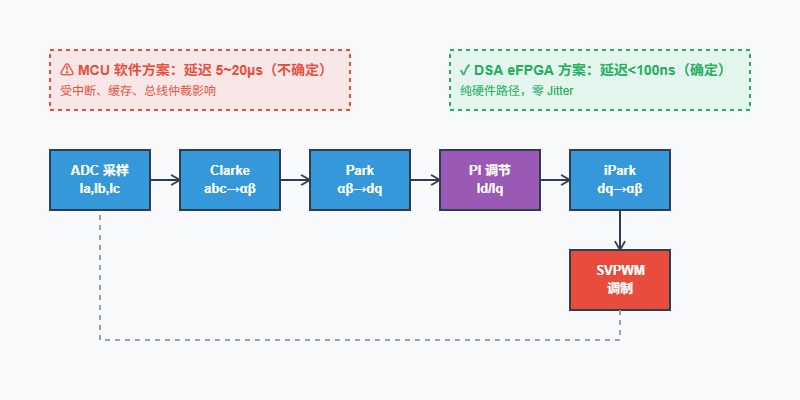
图 1:从三相电流采样到 PWM 输出的完整 FOC 控制链路。红色路径表示传统 MCU 软件方案的不确定 性延迟点,绿色路径表示 DSA eFPGA 硬件确定性路径。
❗️核心洞察:FOC 控制不仅要求"算得快",更要求"每次都在固定时间内完成"。这种硬实时性是传统 MCU 软件架构的根本性瓶颈。
1. FOC 控制环路:为什么纳秒级确定性至关重要
1.1 FOC 算法的本质与实时性挑战
FOC(Field-Oriented Control)算法的核心思想是将三相交流电机的定子电流矢量变换到与转子磁场同步旋转的 dq 坐标系中,使得交流电机可以像直流电机一样进行独立的转 矩控制和励磁控制。这一优雅的数学变换背后,是一系列必须在极短时间窗口内完成的密集运算:
• 坐标变换链:三相静止坐标系(abc)→ 两相静止坐标系(αβ)→ 两相旋转坐标系(dq),每一步都涉及三角函数和矩阵运算。
• 闭环调节器:电流环 PI 调节器需要在每个 PWM 周期内完成 Id 和 Iq 的误差计算、积分累加和输出限幅。对于双闭环或三闭环系统,还要嵌套速度环和位置环。
• 逆向变换与调制:将 dq 坐标系下的电压指令逆变换回αβ坐标系,再通过 SVPWM 算法计算三相 PWM 占空比。
• 无感位置估算(可选):对于无传感器 FOC,还需运行滑模观测器 (SMO)、扩展卡尔曼滤波(EKF)或高频注入算法来实时估算转子位置。
量化对比:不同控制频率下的时间窗口

从上表可以看出,随着 PWM 频率的提升(这是降低转矩脉动、减小电流纹波的必然趋势),留给 FOC 运算的时间窗口正在快速收窄。在 100kHz 的开关频率下,整个控制环路必须在 10µs 内完成——这对于传统 MCU 软件方案来说已经接近极限。
1.2 MCU 软件 FOC 的本质瓶颈:不确定性延迟
更为严峻的问题不在于"能不能在 10µs 内完成运算",而在于"能否每次都在固定时间内完成"。MCU 软件执行路径中存在大量不确定性因素:
❗️软件执行路径中的不确定性来源
• 中断响应延迟:从 ADC 采样完成到进入 ISR,可能经历数微秒的不确定延迟 (取决于当前执行的代码段是否可中断)。
• Cache 未命中:指令 Cache 或数据 Cache miss 会导致访存延迟从数十 ns 跳升至数百 ns。
• 流水线冲突:分支预测失败、数据依赖冒险会导致流水线停顿。
• 总线仲裁:CPU、DMA、外设同时访问总线时的仲裁等待时间不确定。
• 浮点运算单元占用:单 FPU 架构下,除法和平方根等操作会阻塞后续指令。
这些不确定性的叠加可能使得同一段 FOC 代码的执行时间在 3µs 到 15µs 之间波动。对于高速电机和 SiC/GaN 器件,这种 Jitter(时序抖动)是不可接受的:
• 电流环延迟导致的角度误差:在 30,000 RPM 的电机上,1µs 的延迟对应约 0.18°电角度误差(对于 4 极对电机)。这直接降低转矩输出精度。
• 保护响应滞后:SiC MOSFET 的 di/dt 可达 10A/µs 量级,10µs 的保护延迟可能意味着电流已超出安全阈值 100A。
• PWM 同步失调:电流采样需要与 PWM 载波中心严格对齐,延迟抖动会引入采样误差,进而导致电流谐波增大。
三种方案的控制环路延迟分布对比
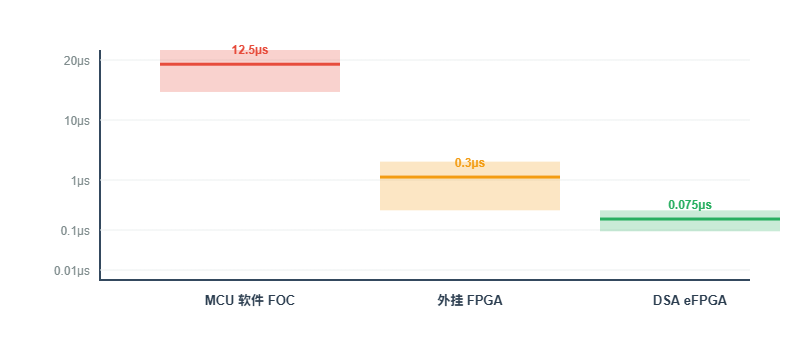
图 2:MCU 软件方案存在显著的延迟抖动(Jitter),DSA eFPGA 实现确定性硬件路径,延迟恒定在 100ns 以下。
1.3 新一代应用场景的极限挑战
随着电机控制技术的演进,多个新兴应用场景对 FOC 实时性提出了前所未有的要求:
• 新能源汽车牵引电机:永磁同步电机转速范围 0~18,000 RPM,需要在全速域内保持高动态响应。弱磁控制区间对电流环带宽要求极高。
• 工业机器人关节电机:协作机器人要求极低的转矩脉动(<2%)和快速的力矩响应(<1ms),这对电流环的控制精度提出严苛要求。
• 无人机多旋翼动力系统:需要 4~8 个电机的并行 FOC 控制,且要求姿态环、 速度环、电流环三环联动,单片 MCU 算力严重不足。
• 高效变频家电:新能效标准要求压缩机电机效率>95%,这需要在全负载范围内实现最优的 Id=0 控制或 MTPA(最大转矩电流比)控制,运算复杂度大幅提升。
这些应用的共同特征是:既要求极高的控制带宽(kHz 级电流环),又要求极低的延迟确定性(ns 级 Jitter)。传统 MCU+ 软件 FOC 的架构已经触及物理极限。
2. DSA eFPGA 方案:架构创新带来的根本性突破
2.1 什么是 DSA eFPGA?
如先前文章所提,DSA(Domain Specific Architecture,领域专用架构)eFPGA 是一种针对特定应用领域优化的嵌入式可编程逻辑架构。与通用 FPGA 的"万能逻辑海"不同, DSA eFPGA 通过在可编程阵列中嵌入领域专用的 Hard IP 核,在保留硬件可编程灵活性的同时,大幅提升关键运算的性能和资源效率。
2.2 与现有方案的全方位对比
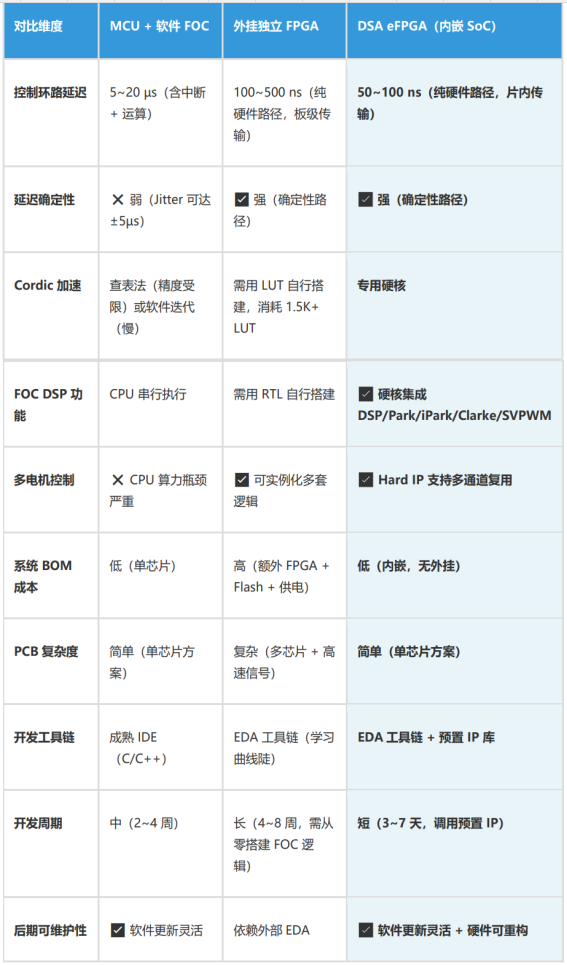
从上表可以清晰看出,DSA eFPGA 在性能、成本、开发效率三个维度上实现了最优平衡:
• 性能维度:与外挂 FPGA 持平甚至更优,远超 MCU 软件方案。
• 成本维度:与 MCU 方案持平(单芯片集成),远优于外挂 FPGA 双芯片方案。
• 效率维度:预置 Hard IP 使得开发周期从"周"级别缩短至"天"级别。
3. 芯璐科技 Alkaid®-F:面向 FOC 控制的 DSA eFPGA 解决方案
3.1 产品概述
上海芯璐科技有限公司(Rapid Flex)作为国内领先的 eFPGA IP 供应商,针对电机 FOC 控制场景推出了 Alkaid®-F 系列 DSA eFPGA IP。该系列产品专为 FOC 控制环路优化, 提供完整的 Hard IP 模块和开发工具链。
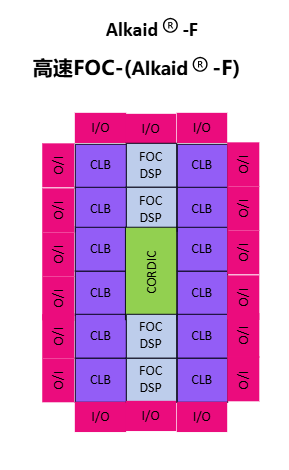
在 FOC 控制领域,Alkaid®-F 的典型架构包括:
• 可编程逻辑阵列(LUT Fabric):提供标准的 Verilog/VHDL 编程能力,用于实现控制策略、状态机、接口逻辑等差异化功能。
• Cordic 运算硬核:主要负责 sin/cos 等三角函数计算,为坐标变换提供高精度的三角函数值。
• FOC DSP 硬核:集成 SVPWM 调制器和高精度 PWM 生成器,负责 DSP、 Park、iPark、Clarke、SVPWM 等核心运算。
❗️关键设计理念:计算资源的"质""量"平衡
通用 FPGA 追求"量"——提供尽可能多的 LUT,让用户自由搭建任何逻辑。
DSA eFPGA 追求"质"——将 FOC 中最高频、最固定的运算(如 Cordic、FOC DSP)用高效的 Hard IP 实现,将灵活多变的控制策略用少量 LUT 实现。
结果是:性能提升 10 倍,资源消耗降低 90%。
3.2 标准配置与技术规格

3.3 核心 Hard IP 深度解析
Alkaid®-F 的性能优势本质上来源于其领域专用 Hard IP 的精心设计。下面详细解析两个关键模块:
3.3.1 Cordic 三角函数引擎
Cordic(COordinate Rotation DIgital Computer)算法是实现三角函数和向量旋转的经典迭代算法。Alkaid®-F 中的 Cordic 硬核采用流水线并行迭代架构,在 16 个时钟周期内完成 16 位精度的 sin/cos 计算。
❗️Cordic 在 FOC 中的应用场景
• Park 变换:需要计算 cos(θ) 和 sin(θ),其中θ为转子电角度。
• 逆 Park 变换:同样需要 cos(θ) 和 sin(θ)。
• 极坐标/直角坐标转换:在某些控制策略中需要进行矢量模值和相角的互转。
相比 MCU 软件查表法(精度受限于表大小,且占用大量 Flash 空间)或浮点库函数调用 (延迟数百 ns),Cordic 硬核的优势是精度高、延迟低、确定性强。
3.3.2 FOC DSP 硬核
FOC DSP 是 Alkaid®-F 中针对 FOC 控制优化的核心 Hard IP 模块,集成了以下功能:
• Clarke 变换:三相静止坐标系(abc)到两相静止坐标系(αβ)的转换。
• Park 变换:两相静止坐标系(αβ)到两相旋转坐标系(dq)的转换。
• 逆 Park 变换(iPark):两相旋转坐标系(dq)到两相静止坐标系(αβ)的 逆变换。
• SVPWM 调制器:硬件化的空间矢量调制,支持多种载波模式。
FOC DSP 硬核的延迟通常在 50~80 ns(@100MHz),而 MCU 软件实现的完整 FOC 环路延迟约为 5µs~15µs。
3.4 开发工具链与生态
芯璐科技为 Alkaid®-F 系列提供了完整的开发工具链和技术支持:
• AAEE(Ark Angel Engineering Edition):芯璐科技自研 EDA 工具链, 基于开源 Yosys/VPR 优化,支持标准 Verilog 2001 语法,提供综合、布局布线、时序分析等完整功能。
• IP 配置:可通过原语配置 Cordic 精度、FOC DSP 参数、PWM 通道数等。
• 联合仿真环境:支持 VCS 和 Iverilog 仿真,提供 FOC 系统级 TestBench。
• 技术支持:提供 FAE 团队一对一支持,协助完成 SoC 集成、时序收敛、功能验证。
4. 应用场景与未来趋势
4.1 典型应用领域
Alkaid®-F 系列 DSA eFPGA 可应用于以下领域:
• 工业伺服驱动器:支持高带宽电流环(>5kHz),实现低转矩脉动(<1%)和快速动态响应(<0.5ms)。
• 新能源汽车 OBC/DC-DC:功率因数校正(PFC)和双向 DC-DC 变换器的高频数字控制。
• 无人机/eVTOL 动力系统:多电机并行 FOC 控制,支持 4~8 路电机的高速同步运行。
• 高效变频家电:压缩机、风机电机的高效 FOC 控制,满足新能效标准(如中国能效 1 级)。
• 机器人关节驱动:协作机器人的低转矩脉动控制和力矩前馈补偿。
4.2 技术演进趋势
随着电机控制技术的持续演进,DSA eFPGA 的价值将进一步凸显:
• SiC/GaN 普及:第三代半导体器件的开关频率已达 100kHz~500kHz,传统 MCU 软件 FOC 已无法满足需求,DSA eFPGA 成为必然选择。
• 无感 FOC 主流化:无传感器 FOC 降低了系统成本,但观测器运算复杂度大幅提升,DSA eFPGA 的算力优势更加明显。
• AI 赋能电机控制:神经网络观测器、模型预测控制(MPC)等 AI 算法开始进 入电机控制领域,eFPGA 的可编程性使其能够快速适配新算法。
• 多电机协同:工业机器人、多旋翼无人机等应用需要多电机精确同步,DSA eFPGA 的并行能力是关键使能技术。
5. 总结与展望
FOC 控制环路对实时性的极致要求,本质上是一场"确定性"与"灵活性"的平衡艺术。传统 MCU 软件方案在灵活性上占优,但确定性不足;外挂 FPGA 在确定性上占优,但成本高昂且开发门槛陡峭。DSA eFPGA 通过"领域专用 Hard IP + 可编程逻辑"的创新架构,首次在两个维度上实现了双赢。
芯璐科技的 Alkaid®-F 系列产品,作为国内面向 FOC 控制优化的 DSA eFPGA 解决方案, 其纳秒级确定性延迟、90%+ 的资源节省、天级开发周期三大核心优势,正在重新定义电机驱动芯片的技术路线。
展望未来,随着电机控制向高速化、高频化、智能化方向演进,DSA eFPGA 将从"可选项 "变为"必选项"。对于国内电机驱动芯片设计企业而言,这既是技术挑战,也是弯道超车的历史机遇。芯璐科技愿与产业伙伴携手,以技术创新推动中国电机控制芯片产业的高质量发展。


